- usage of Minpack library to least square fitting by the least square method (LS) together with
- usage of robust statistical methods and also to prepare
- a simple reference example for testing of any software.
Reference Data and Solution
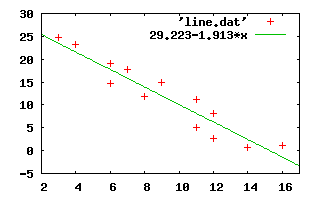
As data for a working example, I selected a tabulated values for a straight line from excellent mathematical handbook: Survey of Applicable Mathematics by K. Rektorys et al. (ISBN 0-7923-0681-3, Kluwer Academic Publishers, 1994). The data set is included in the archive as line.dat.Normal equations:
14*a + 125*b = 170and LS solution:
125*a + 1309*b = 1148.78
a = 29.223
b = -1.913
S0 = 82.6997
rms = 2.625
sa = 1.827
sb = 0.189
Using Minpack
Simple usage of Minpack in LS case is straightforward. One calls hybrd (Jacobian is approximated by numerical differences) or hybrj (must specify second derivatives) and one pass a subroutine to compute vector of residuals in a Minpack required point. Minpack uses Powell's method which combines location of minimum with conjugate gradient method (locate minimum in direction of most steeper slope) far from minimum and Newton's method (fit the function with multidimensional paraboloid and locate minimum by intersection of tangent plane with coordinate axis) near of minimum.
For the straight line, we define
a + b * xi
and minimizing of sum for i = 1 to N:
S = ∑ (a + b * xi - yi)²
The vector for Minpack is
∂S/∂a = ∑ (a + b * xi - yi)
∂S/∂b = ∑ (a + b * xi - yi)*xi.
The Jacobian is than
∂²S/∂a² ∂²S/∂a∂bor
∂²S/∂b∂a ∂²S/∂b²
N ∑ xiAll the sums can be found in minfunj in straightlinej.f90.
∑ xi ∑ xi²
The call of hybrj search for a minimum of the function. On output, the located minimum is included in fvec and I added a code to compute covariance matrix to estimate statistical deviations of parameters and their correlation.
With gfortran I get the solution on 64bit machine:
....
Just for information. The inverse matrix (all by Octave) of Jacobian in minimum is (inv(.))
The second supplied routine straightline.f90 does the same work but without explicit knowledge of the second derivatives. The Jacobian is estimated by numerical differences.
The solution can be also done via lmdef, lmder routines in Minpack. It is equivalent to presented solution but doesn't offers generalization toward robust methods.
The fitting is logically divided onto two parts. The first part implements minimizing of sum of absolute deviations to get robust estimation of proper solution and MAD (mean of absolute deviations). There is little change with respect on LS because minimizing function have no derivation in minimum. We need another method without using of derivatives. I'm using code prepared by John Burkardt, namely using Nelder-Mead Minimization Algorithm (simplex method). I slightly rearranged the code to nelmin.f90.
The resultant parameters are used to obtain MAD by looking for its median by a quick way algorithm described in Niklaus Wirth's Algorithms + Data Structures = Programs.
The solution is than passed as start point for hybrd which is the second part. The minfun is similar to non-robust version. Only difference between predicted and computed solution (residual) is not directly used, but a cut-off function is used (Tukey's function). This small change does robust fitting itself.
The real power of the robust fitting can be easy demonstrated by adding any outlier (point with really different value) to the set, for example, a point with coordinate 10,100. Try to see the robust algorithm in action. It should be practically the same while non-robust solution gives some strange values.
minfun: par = 29.22344 -1.91302 sum = 82.68976The results must correspond (within precision of tree digits) to the reference solution. As we can see, there is a great discrepancy in deviations of parameters. The Minpack's estimation is little bit optimistic. I think that is due to difference between matrix inversion (which is usually used) and Minpack's covariance estimation. On the other side, the values are the same from practical point of view.
minfun: par = 29.22344 -1.91302 sum = 82.68976
hybrj finished with code 1
Exit for:
algorithm estimates that the relative error between x and the solution is at most tol.
qr factorized jacobian in minimum:
q:
0.10769513068469699 0.99418396628934158
-0.99418396628934158 0.10769513068469688r:
152.97596122677001 1371.8039727109779
1371.8039727109779 17.656368881644468
inverse of r (cov):
0.25799238244686612 -2.87651125847342495E-002
-2.87651125847342495E-002 3.20772561895261684E-003
covariance:
1.7777772679919355 -0.19821501231688973
-0.19821501231688973 2.21038374592466315E-002
No. of data = 14
solution = 29.223435764531654 -1.9130248056275454
with dev = 1.3333331421636287 0.14867359368511487
residual sum = 82.689756238430220
rms = 2.6250358130641160
Just for information. The inverse matrix (all by Octave) of Jacobian in minimum is (inv(.))
0.4846353 -0.0462792and the QR factorization ([q,r,.]=qr(.)):
-0.0462792 0.0051833
q =The Q matrix columns are base vectors (eigenvectors) of solution (the principal axes of covariance ellipsoid) and the diagonal elements are estimates of eigenvalues values (major and minor semiaxes of the ellipse) [l,v]=eig(.).
-0.995472 0.095060
-0.095060 -0.995472
r =
-2.0541e+00 -1.2576e+02
0.0000e+00 -1.3150e+03
l =
-0.995457 0.095208
0.095208 0.995457
v =
2.0447e+00 0.0000e+00
0.0000e+00 1.3210e+03
The second supplied routine straightline.f90 does the same work but without explicit knowledge of the second derivatives. The Jacobian is estimated by numerical differences.
The solution can be also done via lmdef, lmder routines in Minpack. It is equivalent to presented solution but doesn't offers generalization toward robust methods.
Robust Fitting
The reference robust fitting procedure is included in rstraightline.f90.The fitting is logically divided onto two parts. The first part implements minimizing of sum of absolute deviations to get robust estimation of proper solution and MAD (mean of absolute deviations). There is little change with respect on LS because minimizing function have no derivation in minimum. We need another method without using of derivatives. I'm using code prepared by John Burkardt, namely using Nelder-Mead Minimization Algorithm (simplex method). I slightly rearranged the code to nelmin.f90.
The resultant parameters are used to obtain MAD by looking for its median by a quick way algorithm described in Niklaus Wirth's Algorithms + Data Structures = Programs.
The solution is than passed as start point for hybrd which is the second part. The minfun is similar to non-robust version. Only difference between predicted and computed solution (residual) is not directly used, but a cut-off function is used (Tukey's function). This small change does robust fitting itself.
.....The output values are practically the same as in non-robust case. Only the difference is estimation of parameter's deviation. I'm using the formula recommended by Hubber (1980), eq. (6.6) p. 173.
medfun: par= 30.57930 -1.918842 sum= 29.9467137
medfun: par= 30.57930 -1.920842 sum= 29.9506577
ifault= 0 29.940157123526994
t= 30.579306941153348 -1.9198428764730142
4.3939266204833984 2.9615066
minfun: par = 30.57931 -1.91984 sum = 106.17691
.....
minfun: par = 29.24548 -1.91425 sum = 82.69177
hybrd finished with code: 1
Exit for:
algorithm estimates that the relative error between x and the solution is at most tol.
qr factorized jacobian in minimum:
q:
-0.10942034931424138 -0.99399556696996860
0.99399556696996860 -0.10942034931424133
r:
29.315789045435952 295.17538616058539
295.17538616058539 4.3667770003656630
inverse:
5.3177769129754946 -0.52802747846866527
-0.52802747846866527 5.24418460845494372E-002
covariance:
2.7756865626932967 -0.27561118127052436
-0.27561118127052436 2.73727405045027551E-002
No. of data = 14
solution = 29.245477844988198 -1.9142493591979692
with dev = 1.6660391840209812 0.16544709276533920
residual sum = 82.691772460937500
rms = 2.6250678159642766
The real power of the robust fitting can be easy demonstrated by adding any outlier (point with really different value) to the set, for example, a point with coordinate 10,100. Try to see the robust algorithm in action. It should be practically the same while non-robust solution gives some strange values.
No comments:
Post a Comment